

机电一体化智能大流量电动执行机构
出处:论文网
时间:2007-03-10
【论文摘要】提出一种新型电动执行机构的设计方案,详细介绍了该执行机构各功能元件的选型与设计、阀位及速度控制原理以及各种关键问题的解决方法。该执行机构将阀门、伺服电机、控制器合为一体,采用8031单片机、变频技术实现了阀门的动作速度和位置控制,解决了阀门的精确定位、阀门柔性开关、极限位置判断、电机保护及模拟信号隔离等技术问题。现场运行情况表明,该电动执行机构具有动作快、保护完善以及便于和计算机通讯等优点。
1 引言
在现代化生产过程控制中,执行机构起着十分重要的作用,它是自动控制系统中不可缺少的组成部分。现有的国产大流量电动执行机构存在着控制手段落后、机械传动机构多、结构复杂、定位精度低、可靠性差等问题。而且执行机构的全程运行速度取决于其电机的输出轴转速和其内部减速齿轮的减速比,一旦出厂,这一速度固定不可调整,其通用性较弱。整个机构缺乏完善的保护和故障诊断措施以及必要的通信手段,系统的安全性较差,不便与计算机联网。鉴于以上原因,采用传统的大流量电动执行机构的控制系统,可靠性和稳定性较差。随着计算机网络、现场总线等技术在工业过程中的应用,这种执行机构已远远不能满足工业生产的要求。笔者设计的大流量电动执行机构,采用机电一体化技术,将阀门、伺服电机、控制器合为一体,利用异步电动机直接驱动阀门的开与关。通过内置变频器,采用模糊神经网络,实现阀门的动作速度、精确定位、柔性开关以及电机转矩等控制。该电动执行机构省去了用于控制电机正、反转的接触器和可控硅换向开关模件、机械传动装置和复杂、昂贵的控制柜和配电柜,具有动作快、保护较完善、便于和计算机联网等优点。实际运行表明,该执行机构工作稳定,性能可靠。
2 电动执行机构的硬件设计及工作原理
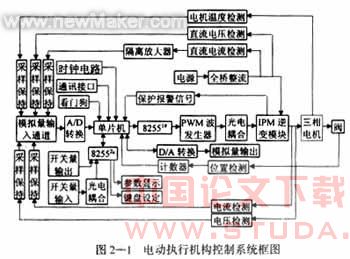
电动执行机构控制系统原理框图如图2-1所示。智能执行机构从结构上主要分为控制部分和执行驱动部分。
控制部分主要由单片机、PWM波发生器、IPM逆变器、A/D、D/A转换模块、整流模块、输入输出通道、故障检测和报警电路等组成。执行驱动部分主要包括三相伺报电机和位置传感器。
霍尔电流、电压传感器及位置传感器检测到的逆变模块三相输出电流、电压及阀门的位置信号,经A/D转换后送入单片机。单片机通过8255控制PWM波发生器,产生的PWM波经光电耦合作用于逆变模块IPM,实现电机的变频调速以及阀位控制。逆变模块工作时所需要的直流电压信号由整流电路对380V电源进行全桥整流得到。
控制系统各功能元件的选型与设计:
1)单片机 选用INTEL公司生产的8031单片机,它主要通过并行8255口担负控制系统的信号处理:接收系统对转矩、阀门开启、关闭及阀门开度等设定信号,并提供三相PWM波发生器所需要的控制信号;处理IPM发出的故障信号和报警信号;处理通过模拟输入口接收的电流、电压、位置等检测信号;提供显示电动执行机构的工作状态信号;执行控制系统来的控制信号,向控制系统反馈信号;
2)三相PWM波发生器 PWM波的产生通常有模拟和数字两种方法。模拟法电路复杂,有温漂现象,精度低,限制了系统的性能;数字法是按照不同的数字模型用计算机算出各切换点,并存入内存,然后通过查表及必要的计算产生PWM波,这种方法占用的内存较大,不能保证系统的精度。为了满足智能功率模块所需要的PWM波控制信号,保证微处理器有足够的时间进行整个系统的检测、保护、控制等功能,文中选用MITEL公司生产的SA8282作为三相PWM发生器。SA8282是专用大规模集成电路,具有独立的标准微处理器接口,芯片内部包含了波形、频率、幅值等控制信息。
3)智能逆变模块IPM 为了满足执行机构体积小,可靠性高的要求,电机电源采用智能功率模块IPM。该执行机构主要适用功率小于5.5kW的三相异步电机,其额定电压为380V,功率因数为0.75。经计算可知,选用日本产的智能功率模块PM50RSA120可以满足系统要求。该功率模块集功率开关和驱动电路、制动电路于一体,并内置过电流、短路、欠电压和过热保护以及报警输出,是一种高性能的功率开关器件。
4)位置检测电路 位置检测电路是执行机构的重要组成部分,它的功能是提供准确的位置信号。关键问题是位置传感器的选型。在传统的电动执行机构中多采用绕线电位器、差动变压器、导电塑料电位器等。绕线电位器寿命短被淘汰。差动变压器由于线性区太短和温度特性不理想而受到限制。导电塑料电位器目前较为流行,但它是有触点的,寿命也不可能很长,精度也不高。笔者采用的位置传感器为脉冲数字式传感器,这种传感器是无触点的,且具有精度高、无线性区限制、稳定性高、无温度限制等特点。
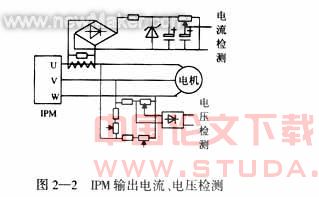
5)电压、电流及检测 检测电压、电流主要是为了计算电机的力矩,以及变频器输出回路短路、断相保护和逆变模块故障诊断。由于变频器输出的电流和电压的频率范围为0~50Hz,采用常规的电流、电压互感器无法满足要求。为了快速反映出电流的大小,采用霍尔型电流互感器检测IPM输出的三相电流,对于IPM输出电压的检测采用分压电路。如图2-2所示。
7)时钟电路 时钟电路主要用来提供采样与控制周期、速度计算时所需要的时间以及日历。文中选用时钟电路DS12887。DS12887内部有114字节的用户非易失性RAM,可用来存入需长期保存的数据。
8)液晶显示单元 为了实现人机对话功能,选用MGLS12832液晶显示模块组成显示电路。采用组态显示方式。通过菜单选择,可分别对阀门、力矩、限位、电机、通讯和参数等信号进行设置或调试。并采用文字和图形相结合的方式,显示直观、清晰。
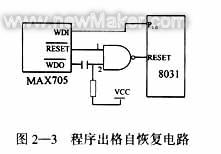
9)程序出格自恢复电路 为了保证在强干扰下程序出格时系统能够自动地恢复正常,选用MAX705组成程序出格自恢复电路,监视程序运行。如图2-3所示,该电路由MAX705、与非门及微分电路组成。
1 引言
在现代化生产过程控制中,执行机构起着十分重要的作用,它是自动控制系统中不可缺少的组成部分。现有的国产大流量电动执行机构存在着控制手段落后、机械传动机构多、结构复杂、定位精度低、可靠性差等问题。而且执行机构的全程运行速度取决于其电机的输出轴转速和其内部减速齿轮的减速比,一旦出厂,这一速度固定不可调整,其通用性较弱。整个机构缺乏完善的保护和故障诊断措施以及必要的通信手段,系统的安全性较差,不便与计算机联网。鉴于以上原因,采用传统的大流量电动执行机构的控制系统,可靠性和稳定性较差。随着计算机网络、现场总线等技术在工业过程中的应用,这种执行机构已远远不能满足工业生产的要求。笔者设计的大流量电动执行机构,采用机电一体化技术,将阀门、伺服电机、控制器合为一体,利用异步电动机直接驱动阀门的开与关。通过内置变频器,采用模糊神经网络,实现阀门的动作速度、精确定位、柔性开关以及电机转矩等控制。该电动执行机构省去了用于控制电机正、反转的接触器和可控硅换向开关模件、机械传动装置和复杂、昂贵的控制柜和配电柜,具有动作快、保护较完善、便于和计算机联网等优点。实际运行表明,该执行机构工作稳定,性能可靠。
2 电动执行机构的硬件设计及工作原理
电动执行机构控制系统原理框图如图2-1所示。智能执行机构从结构上主要分为控制部分和执行驱动部分。
控制部分主要由单片机、PWM波发生器、IPM逆变器、A/D、D/A转换模块、整流模块、输入输出通道、故障检测和报警电路等组成。执行驱动部分主要包括三相伺报电机和位置传感器。
霍尔电流、电压传感器及位置传感器检测到的逆变模块三相输出电流、电压及阀门的位置信号,经A/D转换后送入单片机。单片机通过8255控制PWM波发生器,产生的PWM波经光电耦合作用于逆变模块IPM,实现电机的变频调速以及阀位控制。逆变模块工作时所需要的直流电压信号由整流电路对380V电源进行全桥整流得到。
控制系统各功能元件的选型与设计:
1)单片机 选用INTEL公司生产的8031单片机,它主要通过并行8255口担负控制系统的信号处理:接收系统对转矩、阀门开启、关闭及阀门开度等设定信号,并提供三相PWM波发生器所需要的控制信号;处理IPM发出的故障信号和报警信号;处理通过模拟输入口接收的电流、电压、位置等检测信号;提供显示电动执行机构的工作状态信号;执行控制系统来的控制信号,向控制系统反馈信号;
2)三相PWM波发生器 PWM波的产生通常有模拟和数字两种方法。模拟法电路复杂,有温漂现象,精度低,限制了系统的性能;数字法是按照不同的数字模型用计算机算出各切换点,并存入内存,然后通过查表及必要的计算产生PWM波,这种方法占用的内存较大,不能保证系统的精度。为了满足智能功率模块所需要的PWM波控制信号,保证微处理器有足够的时间进行整个系统的检测、保护、控制等功能,文中选用MITEL公司生产的SA8282作为三相PWM发生器。SA8282是专用大规模集成电路,具有独立的标准微处理器接口,芯片内部包含了波形、频率、幅值等控制信息。
3)智能逆变模块IPM 为了满足执行机构体积小,可靠性高的要求,电机电源采用智能功率模块IPM。该执行机构主要适用功率小于5.5kW的三相异步电机,其额定电压为380V,功率因数为0.75。经计算可知,选用日本产的智能功率模块PM50RSA120可以满足系统要求。该功率模块集功率开关和驱动电路、制动电路于一体,并内置过电流、短路、欠电压和过热保护以及报警输出,是一种高性能的功率开关器件。
4)位置检测电路 位置检测电路是执行机构的重要组成部分,它的功能是提供准确的位置信号。关键问题是位置传感器的选型。在传统的电动执行机构中多采用绕线电位器、差动变压器、导电塑料电位器等。绕线电位器寿命短被淘汰。差动变压器由于线性区太短和温度特性不理想而受到限制。导电塑料电位器目前较为流行,但它是有触点的,寿命也不可能很长,精度也不高。笔者采用的位置传感器为脉冲数字式传感器,这种传感器是无触点的,且具有精度高、无线性区限制、稳定性高、无温度限制等特点。
5)电压、电流及检测 检测电压、电流主要是为了计算电机的力矩,以及变频器输出回路短路、断相保护和逆变模块故障诊断。由于变频器输出的电流和电压的频率范围为0~50Hz,采用常规的电流、电压互感器无法满足要求。为了快速反映出电流的大小,采用霍尔型电流互感器检测IPM输出的三相电流,对于IPM输出电压的检测采用分压电路。如图2-2所示。
7)时钟电路 时钟电路主要用来提供采样与控制周期、速度计算时所需要的时间以及日历。文中选用时钟电路DS12887。DS12887内部有114字节的用户非易失性RAM,可用来存入需长期保存的数据。
8)液晶显示单元 为了实现人机对话功能,选用MGLS12832液晶显示模块组成显示电路。采用组态显示方式。通过菜单选择,可分别对阀门、力矩、限位、电机、通讯和参数等信号进行设置或调试。并采用文字和图形相结合的方式,显示直观、清晰。
9)程序出格自恢复电路 为了保证在强干扰下程序出格时系统能够自动地恢复正常,选用MAX705组成程序出格自恢复电路,监视程序运行。如图2-3所示,该电路由MAX705、与非门及微分电路组成。
- 上一篇:多层次总线下的煤矿安检设备系统设计
- 下一篇:宽厚钢板电磁起重系统的方案设计