

机电一体化智能大流量电动执行机构
出处:论文网
时间:2007-03-10
3 阀位及速度控制原理
阀位及速度控制原理框图如图3-1所示。
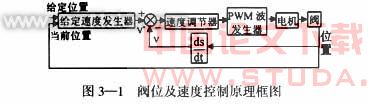
外环主要根据当前位置速度的设定,通过速度给定发生器向内环提供速度的设定值。由于大流量阀执行机构在运行过程中存在加速、匀速、减速等阶段。各阶段的时间长短、加速度的大小、在何位置开始匀速或减速均与给定位置、当前位置以及运行速度有关。速度给定发生器的工作原理为:通过比较实际阀位与给定阀位,当二者不相等时,以恒定加速度加速,减速点根据当前速度、阀位值、阀位给定值的大小计算得来。
执行机构各阶段运行速度的计算原理
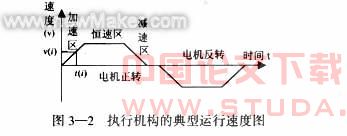
设第i段速度的变化速率为ki,则有:

Δt为两段之间的时间,Δt=ti+1-ti。
显然,当ki=0时为恒速段,ki>0时为升速段,ki<0时为减速段。任意时刻的速度给定值为:

变化速率ki的取值由给定位置、当前位置以及运行速度的大小确定。
4 关键技术问题的解决
该电动执行机构采用了最新的变频调速技术,电机驱动功率小于5.5kW。用户可根据需要设定力矩特性,根据控制的阀设定速度,速度分多转式、直行程、角行程3种方式。控制系统由阀位给定和阀位反馈信号构成的闭环系统,控制特性视运行方式、速度而定,并具有自动过流保护、过载保护、超压、欠压、过热、缺相、堵转等保护功能。
该执行机构解决的关键性技术问题主要有:
1)阀门柔性开关 柔性开关主要是为了当阀关闭或全开时,保证阀门不卡死与损伤。执行机构内部的微处理器根据测得的变频器输出电压和电流,通过精确计算,得出其输出力矩。一旦输出力矩达到或大于设定的力矩,自动降低速度,以避免阀门内部过度的撞击,从而达到最优关闭,实现过力矩保护。
2)阀位的极限位置判断 阀位的极限位置是指全开和全关位置。在传统执行机构中,该位置的检测是通过机械式限位开关获得的。机械式限位开关精度低,在运行中易松动,可靠性差。在文中,电动执行机构极限位置通过检测位置信号的增量获得。其原理是,单片机将本次检测的位置信号与上次检测的信号相比较,如果未发生变化或变化较小,即认为己达到极限位置,立即切断异步电机的供电电源,保证阀门的安全关闭或全开。省去了机械式限位开关,无需在调试时对其进行复杂的调整。
3)电机保护的实现 为了防止电机因过热而烧毁,单片机通过温度传感器连续检测电机的实际运行温度,如果温度传感器检测到电机温度过高,自动切断供电电源。温度传感器内置于电机内部。
4)准确定位 传统的电动执行机构在异步电机通电后会很快达到其额定动作速度,当接近停止位置时,电机断电后,由于机械惯性,其阀门不可能立即停下来,会出现不同程度的超程,这一超程通常采用控制电机反向转动来校正。机电一体化的大流量电动执行机构根据当前位置与给定位置的差值以及运行速度的大小超前确定减速点的位置及减速段变化速率ki,使阀门在较低的速度下实现精确的微调和定位,从而将超程降到最低。
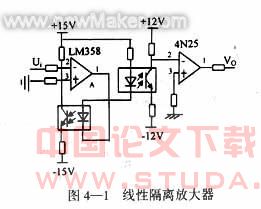
5)模拟信号的隔离。
对于变频器的直流电压以及输出的三相电压,它们之间的地址不一致,存在着较高的共模电压,为了保证系统的安全性,必须将它们彼此相互隔离。采用LM358和4N25组成了隔离线性放大电路。如图4-1所示,采用±15V和±12V两组独立的正负电源。若运放A的反相端电位由于扰动而正向偏离虚地,则运放A输出端的电位将降低,因而光电耦合器的发光强度将增强,则使其集射极电压减小,最后使运放A反相端的电位降低,回到正常状态。若A的反相端电位负向偏离虚地,也可以重回到正常状态。从而增强了系统的抗干扰性。
该执行机构集微机技术和执行器技术于一体,是一种新型的终端控制单元,其电机是通过内部集成的一体化变频器来控制,因此,同一台智能执行机构可以在一定范围内具有不同的运行速度和关断力矩。该智能执行机构采用了液晶显示技术,它利用内置的液晶显示板,不仅可以显示阀门的开、关状态和正常运行时阀门的开度,还可以通过菜单选择运行参数设定,当系统出现故障时,能显示出故障信息。总之,该执行机构集测量、决断、执行3种功能于一体,顺应了电动执行机构的发展趋势,它的研制成功给电动执行机构的研究开发提供了新的思路。
参考文献
[1] 邓 兵,等.数字阀门电动执行机构[J].自动化仪表,2001(1).
[2] Liu Jianhou.The research on reliability and environmentadaptability of electric control valve used in unclear powerstation[J].Maintainability and Safety,vol.2,Dalian,China,28-31 August2001.
[3] Antsaklis PJ.Intelligence andlearning[J].IEEEControl Syst Mag,1995(15).
[4] 王福瑞,等.单片机微机测控系统设计大全[M].北京航空航天大学出版社,1999,9-249.
[5] 陈玉红.一种简单实用的线性光隔离放大器[J].漳州师范学院学报(自然科学版),1999(4).
- 上一篇:多层次总线下的煤矿安检设备系统设计
- 下一篇:宽厚钢板电磁起重系统的方案设计